问题解答
A.6合1探索者编程教育机器人
Q1:为何机器人启动开关打开后无反应?
A:可能是以下原因导致机器无法正常启动
1.电池电量不足。请将18650锂电池充满电之后再使用;
2.电源接线未正确插接或电机线连接异常。请检查电源线和电机线插接情况。
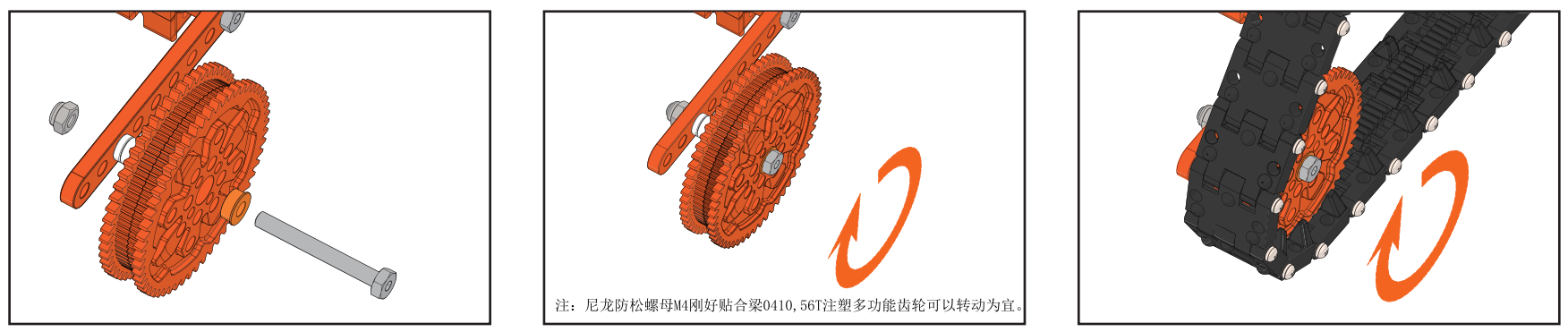
Q2:为什么我的机器人安装出现卡死或者履带歪斜现象?
A:请严格按照说明书要求,需要运转的地方的尼龙防松螺母不能锁紧,以防卡死铜轴承,导致无法运转或履带歪斜。
 Q3:为什么我无法将电脑通过USB或者手机无法通过蓝牙连接到机器人?
Q3:为什么我无法将电脑通过USB或者手机无法通过蓝牙连接到机器人?
A:1.请尝试安装驱动和重启主控板后再连接。详请访问www.weeemake.com/cn或发送邮件到support@weeemake.com。
2.请尝试重启手机app或重启主控板。
Q4:为何只通过USB供电,无法让电机等功率器件工作?
A:USB供电仅能满足主板上的芯片,传感器等模块工作。若要使电机等大功率器件工作,请外接电源并打开电源开关。
Q5:为什么机器人上的螺丝使用后会出现松动?
A:机器人固定用的螺丝是不锈钢普通螺丝,不能防松。机器人的运行振动可能导致螺丝松动,请及时用螺丝刀拧紧。
Q6:为什么巡线传感器无法正常工作?
A:可能是以下原因导致巡线传感器无法正常工作:
1.巡线传感器最佳可探测物体的距离是1-2cm,请确保巡线传感器在最佳工作范围内。
2.周围环境光太强烈,比如日光,可以干扰巡线传感器的工作。请避免在强光下使用巡线功能。
3.自制的巡线地图反光太强烈,导致巡线传感器无法正常检测。
Q7.出现哪些现象时,说明需要给电池充电 ?
A:当机器人设置运行速度最大,依然运行缓慢无力,甚至出现主控重启现象时,说明电池电量不足。
Q8:为什么我的WeeeMake app连上蓝牙后还是无法控制我的机器人?
A:可能是因为你用WeeeCode 客户端软件更改了出厂固件,因此此时想要用移动端应用控制需要恢复出厂固件,请参看说明书第47页如何恢复出厂固件即可。或参看app快速入门。
Q9:为什么机器人运行噪音较大?
A:1.请检查结构安装的间隙情况,是否正确安装。
2.为减少噪音,可以在轴承上添加少量润滑油。
Q10:为什么机器人的转向与预期相反?
A:可能电机接口接错,此时请交换M1和M2的接线可修正问题。
Q11:说明书只提供了三种形态搭建,更多的搭建形态在哪里下载或者查看?
A:请访问www.weeemake.com/cn的6合1探索者机器人的详情页获取另外三个形态的搭建说明。